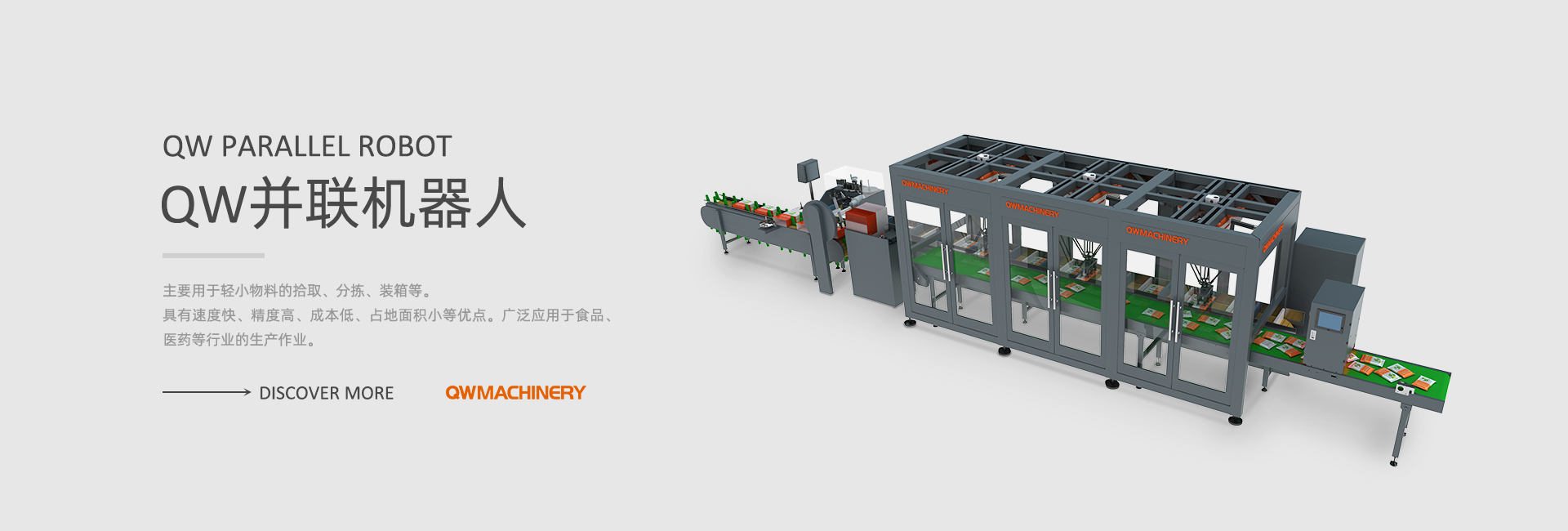
通过3D视觉成像技术,对散乱的物件表面轮廓进行快速扫描,加以人工智能分析,计算出当前物件的实时坐标,引导机器人精准拾取。

适用行业
.png")
安装方式
.png")
工件实物与点云数据
通过三维快速成像技术,扫描物体表面轮廓,获取物体的三维点云数据。
然后利用人工智能分析、机器人智能路径规划和自动避碰技术对点云数据进行处理。
计算当前工件的实时坐标和空间姿态,并向机器人发送指令,引导机器人准确抓取。

应用场景
1、多品种工件的3D定位抓取上料
2、料筐堆放物体的3D识别定位
3、复杂多面工件的柔性化3D定位抓取
4、大型物体的3D定位抓取
5、无序来料工件的3D定位抓取
6、多工序间机器人协作的3D定位抓取
7、输送带上物体的快速3D定位抓取
8、来料喷涂的3D识別定位
9、大型设备装配的3D定位
.png")